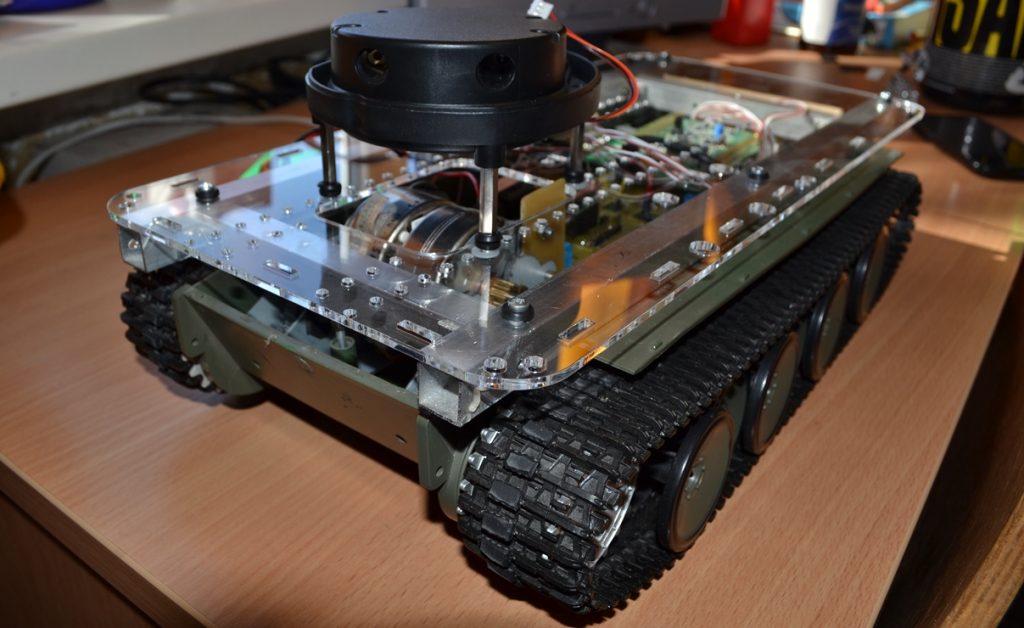
Robotika – viena iš technologinių sričių, kuri plačiai taikoma įvairiose srityse, t. y. gamybos sektoriuje, logistikoje, automobilių pramonėje, medicinoje, agronomijoje ir t.t. Tyrinėjimo sritis yra labai kompleksiška ir kol kas nėra iki galo išnagrinėta. Vienas iš pagrindinių klausimų yra tikslus pozicijos nustatymas nežinomojo aplinkoje. Robotai daro įvairiais klaidas, kurios atsiranda dėl netikslaus pozicijos nustatymo. Sukurtas robotas paremtas 2D lazeriniu atstumo matavimu ir EKF (išplėstiniu Kalman filtru). Įterptinė sistema integruota su bendros paskirties ARM mikroprocesoriu. Išradimas yra autonominis robotas su pažangia pozicionavimo sistema. Yra dideles galimybės išradimą pritaikyti, kaip namų tvarkymo robotą, ar net sistema pritaikyti autonominiuose karo mašinose, autonominiuose automobiliuose, statybų robotuose, gamyboje, medicinoje, agronomijoje ir t.t.
Trukmė:
2016 - 2016



