Magnetoreologiniai (MR) skysčiai susideda iš nešančiojo skysčio (alyva, glikolis, vanduo ir pan.) ir dispersinių feromagnetinių dalelių (5 – 10 µm). Šie skysčiai buvo gerai ištyrinėti dėl jų savybės greitai keisti kietumą. Kai skystis paveikiamas magnetiniu lauku, dalelės tampa poliarizuotos ir susirikiuoja į ištisas grandines, kurių dėka stipriai padidėja šlyties įtempiai bei skysčio klampumas. Kontroliuojamos reologinės šių skysčių savybės panaudojamos įvairiuose įrenginiuose, tokiuose kaip stabdžiai, sankabos, amortizatoriai ir pan. Tai padaro MR skysčius patrauklia, naujos kartos išmaniąja medžiaga. Kuriant slopinimo sistemas, susiduriama su problema, kaip, naudojant nedidelių matmenų mechanines sistemas, užtikrinti žalingų virpesių slopinimą plačiame virpesių diapazone. Keičiantis žadinančiųjų virpesių pobūdžiui, reikia keisti sistemos standumo ir slopinimo parametrus. Atsiradus išmaniosioms medžiagoms, pvz., magnetoreologiniams, elektroreologiniams skysčiams ir pan., atsirado galimybė valdyti slopinimo sistemų dinaminius parametrus, tiekiant sistemoms išorinį elektrinį signalą ir formuojant tą signalą programuojamuoju loginiu valdikliu. Tačiau, kuriant tokias sistemas, svarbu parinkti tinkamą slopintuvo tipą ir pagrindinius šios sistemos parametrus. Šie išmanieji amortizatoriai gali suveikti per kelias milisekundes, todėl jų panaudojimo galimybės yra labai didelės. Juos galima naudoti vietoje įprastų amortizatorių. Šiuo metu jie yra naudojami Audi automobiliuose, BMW motocikluose, taip pat Kinijoje yra pastatytas tiltas, kurio atramose panaudoti būtent MR skysčio pagrindu veikiantys slopintuvai. Šie amortizatoriai taip pat naudojami lėktuvuose bei karinėje pramonėje – raketų paleidimo įrenginiuose. Taip pat platus pritaikymas yra medicinoje, pvz., galūnių protezuose, įtvaruose ir pan. Šie slopintuvai taip pat plačiai naudojami virpesių slopinimui tiek pramonėje (industrinėse mašinose), tiek namų aplinkoje (pavyzdžiui skalbimo mašinos skalbinių gręžimo metų sukeliamų vibracijų slopinimui).
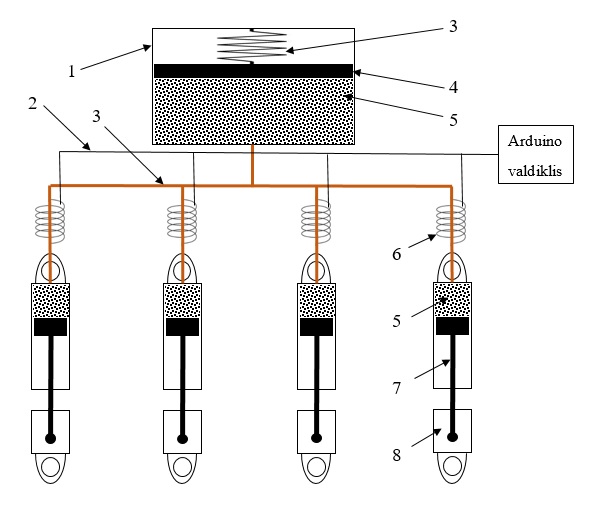
Pasirinktas vieno stūmoklio amortizatorius buvo pritaikytas radijo bangomis (RC) valdomame modelyje. RC modelis su magnetoreologiniais amortizatoriais yra sukurtas RC modelio stabilumui, kelio nelygumų kompensacijai. Šiuo tikslu yra sukurti bei pritaikyti aktyvūs amortizatoriai, užpildyti magnetoreologiniu skyčiu. Visa sistema veikia kaip susisiekiantys indai. Jos principinė schema pavaizduota paveiksle. Modelio viduryje yra pritvirtintas rezervuaras su magnetoreologiniu skysčiu 1. Jo viduje prie spyruoklės 3 yra pritvirtintas stūmoklis 4, kuris spaudžia magnetoreologinį skystį 5, taip sudarydamas slėgį sistemoje. Šis rezervuaras lanksčiaisiais vamzdeliais 3 yra sujungtas su kiekvienu iš 4 amortizatorių. Ant vamzdelio, prie pat amortizatoriaus, yra susukta ritė 6, kurią, prijungus prie maitinimo šaltinio, sukuriamas magnetinis laukas. Magnetiniu lauku paveikus MR skystį, šis pakeičia savo būseną (sukietėja). Ritės valdomos valdiklio Arduino UNO pagalba, siunčiant signalus laidais 2 į rites. Taip galima valdyti amortizatoriaus viduje esančio stūmoklio 7, nejudamai pritvirtinto prie apatinės amortizatoriaus dalies 8, judesį. Kadangi amortizatoriai yra tvirtinami prie kiekvieno rato, esant kelio nelygumams, modelio korpusas išlieka horizontalioje padėtyje. Tai svarbu norint išlaikyti stabilų perduodamą vaizdą, jei prie RC modelio pritvirtinama video kamera. Išbandžius šiuos amortizatorius bei sukūrus jų valdymo algoritmą žaisliniame modelyje, galima būtų pradėti ir didesnių amortizatorių gamybą bei juos pritaikyti realiuose automobiliuose ar kitose transporto priemonėse.
Trukmė:
2017 - 2017



