Pasaulyje sparčiai populiarėja praktika, kai vieną savaitės darbadienį darbuotojai lieka dirbti namuose. Tačiau tokia praktika populiari su kompiuteriu susijusiomis darbo vietomis.
O kaip sudaryti sąlygas darbuotojui likti dirbti namuose arba persikelti į saugią aplinką, jei reikia prižiūrėti sudėtingą procesą, kurio metu reikia reaguoti lanksčiai, kūrybingai ir nesusižaloti? Tokių epizodinių darbų automatizavimas yra atidedamas dėl prasto atsiperkamumo, nes kam automatizuoti, jei galima pasamdyti žmogų, kuris prižiūrėtų procesą.
Taip, galima. Tačiau ar yra sukuriamos sąlygos tam žmogui saugiai dirbti? Juk labai dažnai sudėtingus procesus lydi nenumatyta gamybinė rizika. Pavyzdžiui, gal vykdomas mielių auginimas su metanolio tiekimu, o gal bioreaktoriaus terpė šarminama su amoniako tirpalu? Plyšus skysčių tiekimo žarnai ar avarijos atveju robotizuotas manipuliatorius neišsigąstų pakitusių agresyvios aplinkos sąlygų. Intuityvus ir distancinis tokio roboto rankos valdymas ir buvo šio projekto tikslas.
Praktikoje yra keletas tokio distancino valdymo galimybių. Dažnai roboto manipuliatoriai yra kontroliuojami (A) valdymo pultais, kuriems reikia tam tikrų įgūdžių. Bėda ta, kad net įgudusiam operatoriui gali prireikti viena akimi žiūrėti į pultą (LCD), o kita akimi į procesą. Deja, tuo atveju kyla rizika laiku nesureguoti į besikeičiančias sąlygas.
Antroji galimybė yra (B) deterministinis (dar kitaip – programinis) valdymas, kai visa eiga yra iš anksto suplanuojama. Tačiau bėda ta, kad praktikoje sudėtinguose procesuose reikia ne tik reaguoti adaptyviai, bet ir atlikti veiksmą, kuriam buvo nepasiruošta.
Trečioji galimybė yra pasitelkti (C) vaizdo apdorojimo priemones ir suprogramuoti kiek galima daugiau scenarijų algoritmų. Net neverta ginčytis dėl tokios sistemos naudos. Tačiau tokioms sistemoms yra reikalingas tas svarbus pradinis žingsnis – mokymas (arba Learning). Mokyti galima ne tik vaizdo apdorojimo sistemą, bet ir roboto manipuliatoriaus pavarų reguliatorių. O geriausias mokytojas, žinome, yra
žmogus arba ekspertas – operatorius. Jei žmogus turėtų tokį prietaisą, kurį galėtų intuityviai valdyti ir galėtų visą savo dėmesį (ir dvi akis) sutelkti tik į procesą, toks įtaisas taptų nepamainomu pagalbininku ne tik derinant ekspertinę žmogaus kompetenciją su esamomis vaizdų apdorojimo sistemomis, bet suteiktų žmogui galimybę būti tokiose sąlygose, kuriose jis yra saugus ir gebantis be baimės reaguoti į nemalonius netikėtumus. Be to dažnai gamybinėse patalpose yra griežti darbuotojų aprangos reikalavimai, kai naudojamos brangios vienkartinės priemonės. Su šio projekto distanciniu valdymu operatorius galėtų būti patalpose, kuriose griežti aprangos reikalavimai netaikomi.
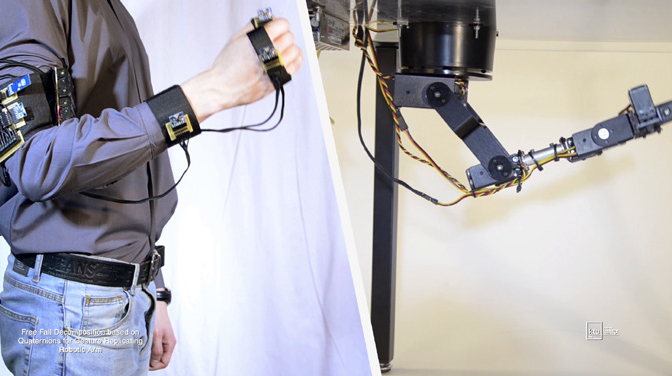
Šio projekto rezultatas yra keturių inercinių jutiklių sistema, kuri yra išdėstyta ant žmogaus rankos ir roboto manipuliatoriaus valdymo sistema, skirta servo pavaroms valdyti ir žmogaus rankos judesiams atkartoti. Kaip matyti iš demonstracinio video https://www.youtube.com/watch?v=KRvqwa1g7tI operatorius gali pilnai sutelkti dėmesį į patį procesą, šiuo atveju į figūrėlės paėmimą ir įmetimą į dėžę, manipuliatorių intuityviai valdydamas rankos judesiais, kuriems jokio specialaus apmokymo nereikia. MPU 6050 inercinių jutiklių pagalba buvo matuojami kiekvienos roboto ašies padėtys žemės atžvilgiu. Pagrindinė problema su akselerometrai yra ta, kad jie laisvojo kritimo pagreičio vektoriaus kryptį stabiliai matuoja tik stacionariomis sąlygomis. Kaip matyti iš projekto rezultatų, duomenų suliejime naudotas santykinės entropijos metodas leido gauti gerus rezultatus ne tik dinaminėje aplinkoje, bet ir tada, kai yra išoriniai trikdžiai arba judesio metu.
Trukmė:
2016 - 2016



