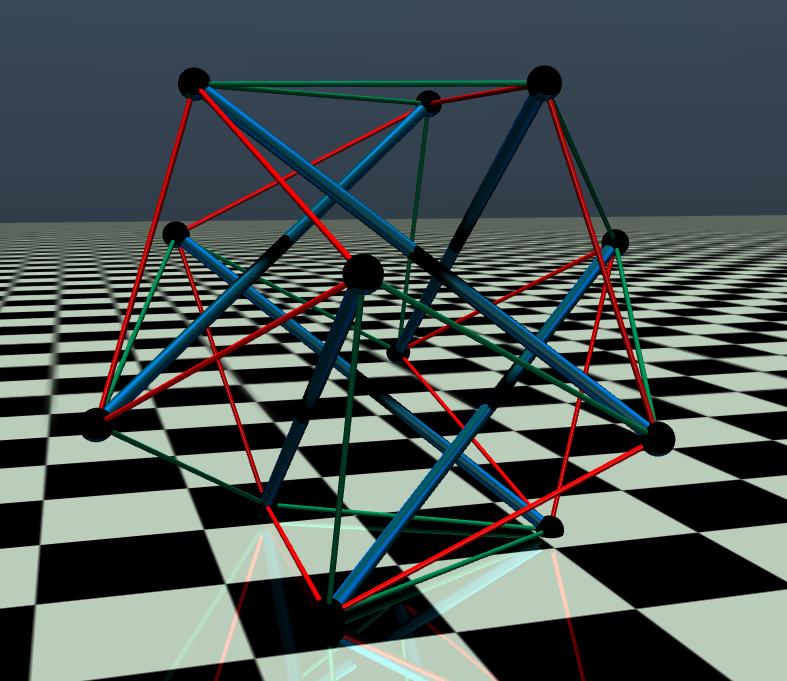
Išradimo tikslas – algoritmas, kuris išmoktų kontroliuoti nežinomos struktūros robotą judėti norima kryptimi. Bandymams pasirinktas trosinis (angl. Tensegrity) robotas imitacinėje aplinkoje MuJoCo. Robotas sudarytas iš 6 tarpusavyje trosais sujungtų strypų. Roboto forma keičiama dvylikos valdomų trosų ilgių pagalba.. Iš imitatoriaus gaunama roboto masės centro koordinatės, trosų ilgiai.
Šiuo metu yra sukurti 2 algoritmai. Pirmasis naudoja du neuroninius tinklus. Vienas skirtas roboto judesiams nustatyti, vadinamas aktoriumi. Kitas bando įvertinti judesių gerumą, jis vadinamas kritiku. Pagal kritiko įvertinimą yra keičiami aktoriaus parametrai, kol gaunamas geriausias judėjimo rezultatas. Antrasis algoritmas paremtas evoliuciniais metodais. Bandoma atrasti tokius neuroninio tinklo parametrus, su kuriais gaunamas geriausias rezultatas. Algoritmai realizuoti Python programavimo kalba. Su imitatoriumi bendraujama per OpenAI Gym aplinką.
Panaudojimas – greito roboto judesio valdiklio sukūrimas, gebantis prisitaikyti prie pasikeitusios aplinkos.
Trukmė:
2018 - 2018



