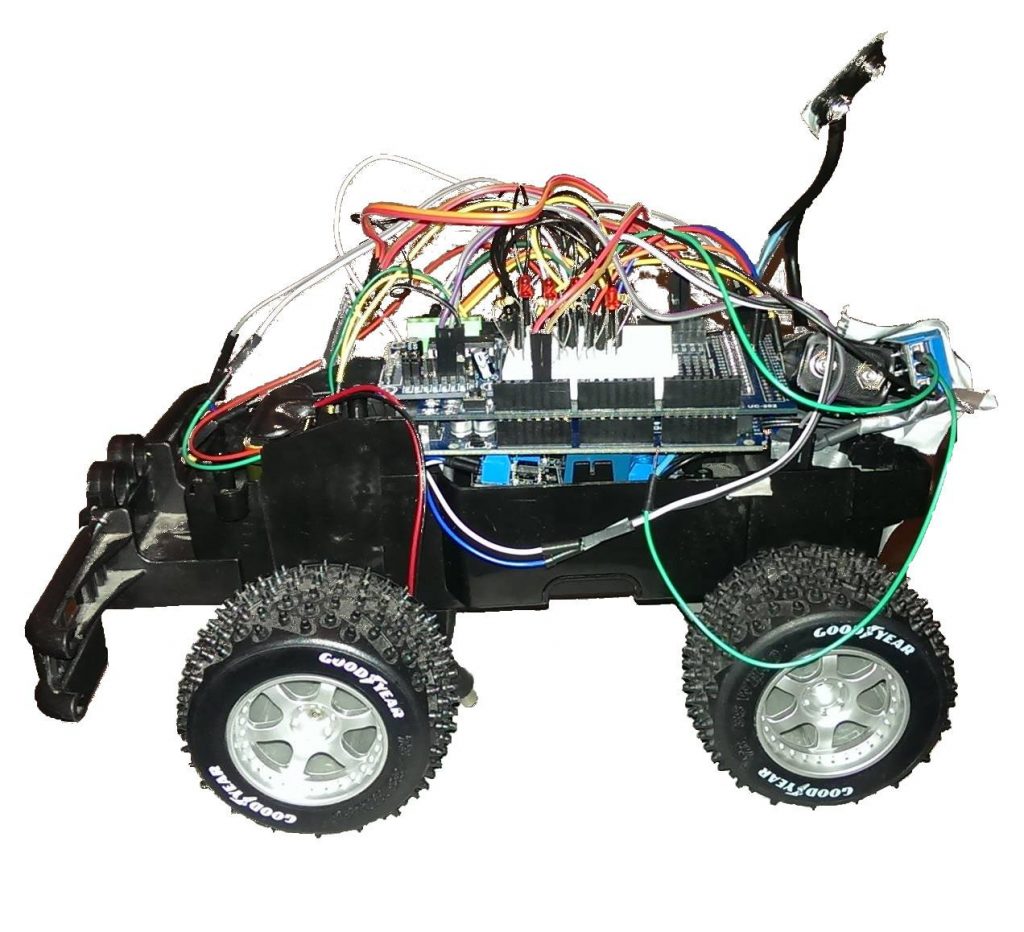
Vien iš mūsų išradimo pavadinimo galima suprasti, kad jo paskirtis yra susijusi su kambarių planavimu. Įrenginys buvo sukurtas panaudojant senos radijo bangomis valdomos mašinėlės modelį, į kurį buvo įdėta „Arduino Mega 2560“ mikroschema, valdanti mašinėlės darbą. Prie šios mikroschemos buvo prijungtas Bluetooth ryšio modulis tiesioginiam ryšio palaikymui, mašinėlės motorų valdiklis (draiveris), trys perjungikliai (rėlės) ir ultragarsinis jutiklis, skirtas atstumo bei padėties fiksavimui. Visos išvardytos dalys veikia kartu, į „Arduino“ mikroschemą įdiegus programinį kodą ir valdant roboto darbą kompiuteriu.
Roboto darbas prasideda nuo atstumo išmatavimų ultragarsiniu jutikliu aplink save, įrenginiui esant pradinėje padėtyje kambaryje. Toliau jis juda po kambarį taip, kad visuose judėjimo taškuose fiksuojamas atstumas iki kambario ribų būtų mažesnis už ultragarsinio jutiklio maksimalų matavimo atstumą, kuris priklauso nuo jutiklio tipo. Robotui baigus savo darbą, gaunami visi kambario išmatavimai polinėje koordinačių sistemoje. Šie duomenys perduodami į kompiuterį, jame apdorojami programine įranga ir galiausiai pateikiamas kambario planas, kurį galima naudoti pagal norimą paskirtį.
Kadangi tai dar yra tik pirminė roboto versija, jo veikimas gali būti tobulinamas. Tai galima pasiekti tobulinant kambario planavimo algoritmą, kitaip sakant, efektyviau sukurti planą pagal turimus matavimo taškus. Darbas taptų dar efektyvesnis, pasirinkus įdiegti roboto pozicijos patalpoje nustatymo būdą pagal kambario kampuose prieš darbą išdėstomus daviklius bei primontavus daugiau ultragarsinių jutiklių greitesniam atstumo matavimui. Įdiegus geresnę važiuoklę, būtų palengvintas įrenginio valdymas ir pagerintas manevringumas, o suprojektavus robotui korpusą ir 3D spausdintuvu jį atspausdinus, mūsų išradimas taptų patrauklesnis akiai.
Kambario arba patalpos išplanavimo nustatymo robotas galėtų būti pritaikomas gamyklose, kurios siekia kuo efektyviau išnaudoti turimą patalpą darbui, kuomet planuojama vieta naujų gamybinių įrenginių instaliacijai ar patalpų rekonstrukcijai. Robotas turėtų sudominti ir statybines įmones, kurios atlieka remontus bei senų pastatų restauracijas. Išradimas būtų naudingas ir architektūros įmonėms, kuriant naujus ir atnaujinant senus pastatų planus.
Apibendrinus, nors mūsų kambario išplanavimo nustatymo su tiesioginiu ryšiu robotas yra sukurtas naudojant paprastas detales, o jo funkcijos dar gali būti tobulinamos, jis vis tiek jau gali būti pritaikomas ne vienoje srityje, susijusioje su statyba ir architektūra.
Trukmė:
2016 - 2016



